
AFLGo基本原理
AFLGo的流程架构
1.首先,编译源码,得到待 fuzz 程序的控制流图 (Control Flow Graph, CFG) 和函数调用图 (Call Graph, CG) 。
2.其次,通过 CFG 和 CG,以及给定的 target,计算所有的基本块 (Basic Block, BB) 到 target 所在的基本块的距离。这一步由 python 脚本完成。
3.然后,再编译一次源码,对程序进行插桩,除了AFL原有的插桩逻辑外,添加向指定地址增加每个基本块距离的指令,即指定一个共享内存地址为记录 distance 的变量,在基本块中插桩,插入如下指令:distance += current_BB_distance,向 distance 变量增加当前基本块的距离。
4.最后是 fuzzing 部分的逻辑,根据插桩反馈的信息,我们可以在每一个 seed 作为输入给程序执行的时候得到这个 seed 对应的 distance,也就是 seed 执行路径距离目标点的距离,然后根据距离对 seed 进行打分,这个打分的算法就是模拟退火算法,距离越近,打分越高,seed 得到变异的机会越多。
至此,整个 AFLGo 的流程结束。
Aflgo距离计算模块
AFLGO 首先根据 函数调用图CG 计算函数层面的距离,然后基于 CFG 计算基本块层面的距离,最后将基本块的距离作为插桩时使用的距离。
因为 AFLGo 支持标记多个目标,所以在距离计算时需要将每个基本块到多个目标的距离做一个加和,这里采用的是对到每个目标的距离和取调和平均数。
为什么不取算术平均数?因为在多目标的情况下,算术平均数无法区分『一个基本块离一个目标近一个目标远』和『一个基本块离两个目标点距离相等』的情况。
如下图,当目标为Y1和Y2时,三个白色基本块都可以到达这两个灰色的目标点。当用算术平均数计算时,左右分别到两个目标点的距离是1和3,平均下来就是(1+3) / 2= 2。而最上面的点到两个目标的距离都是2,平均下来也是2,这样三个点距离都是2,区分不出到哪个点距离近。如果取调和平均数,左右两个点距离都是是3/4,最上面的点距离是1,这样就能区分出远近了。
函数层面距离计算
目标基本块所在的函数就是目标函数。
公式看起来比较复杂,其实就是两句话:
1.当该函数不能到达任意一个目标函数(即:CG上该函数没有路径能到达目标函数)时,不定义距离
2.否则,将该函数能够到达的目标函数之间的最短距离取调和平均数
基本块层面距离计算
有了函数层面的距离,再计算更加细的基本块距离,规则如下:
1.当基本块就是目标基本块时,该基本块的距离为0
2.当当前基本块存在函数调用链可以到达目标函数时,距离为该基本块调用的函数集和中,『距离目标函数最近的路径距离』乘上一个系数
3.否则,距离为『有能到达目标基本块的后继基本块时,取当前基本块到后继基本块距离』 + 『该后继基本块到目标基本块的距离』,取到所有目标的调和平均数
模拟退火算法
模拟退火算法是为了解决探索-利用 (exploration-exploitation)的问题。
在fuzzing的前期,因为探索到的路径有限,此时离目标点的距离可能还很远,此时重点在探索,即尽可能扩大覆盖率,当覆盖率到一定程度时,再利用距离较近的seed来变异,此时到达目标点的可能性更大。
如果在距离还很远的时候,就只针对当前距离最近的seed进行变异,虽然当前seed距离是相对最近的,但是在绝对距离上可能还很远,无论怎么fuzzing,到达目标点的可能性就很小,这样就可能会陷入局部最优的困境中。
模拟退火算法就是为了避免fuzzing陷入局部最优的困境中的方法。
AFL中有一个环节叫 power scheduling,即对 seed 进行打分,综合各项指标计算分数,这个分数直接影响到对每个 seed 进行 fuzzing 的时间长度。
而 AFLGo 在 power scheduling 部分加上模拟退火算法,同时以时间和距离来计算分数。当时间越长,距离越近的 seed 得分越高,能够得到 fuzzing 的时间越长。
多脆弱点挖掘技术
技术1:
参考论文:
Constraint-guided Directed Greybox Fuzzing | USENIX
约束导向的定向灰盒模糊测试
该项目代码不开源
约束引导定向灰盒模糊(CDGF)旨在按顺序满足一系列约束,而传统的DGF仅旨在达到一组独立的目标位点。每个约束都有自己需要达到的目标站点,以及需要在其目标站点上满足的数据条件。
为了实现这一目标,CDFG对更有可能满足所有约束的种子进行模糊处理。换句话说,对于以下两种情况,它给出了更短的种子距离:1)如果它满足更多的约束,2)如果它比另一个更接近于满足第一个未满足的约束
CDGF通过组合每个约束的距离来定义约束序列的距离或总距离。当前面的约束不满足时,CDGF认为单个约束的距离达到最大值,当剩下更多的约束不满足时,CDGF得到的总距离更长。
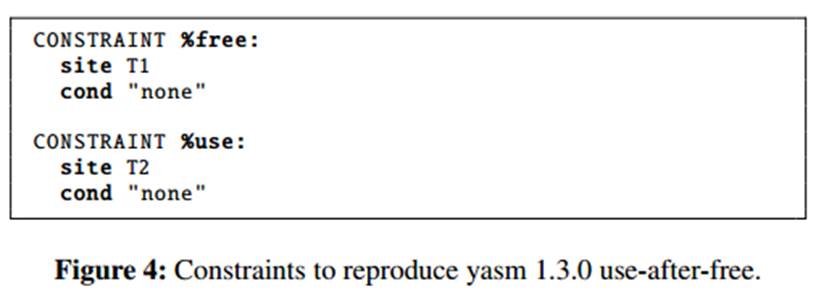
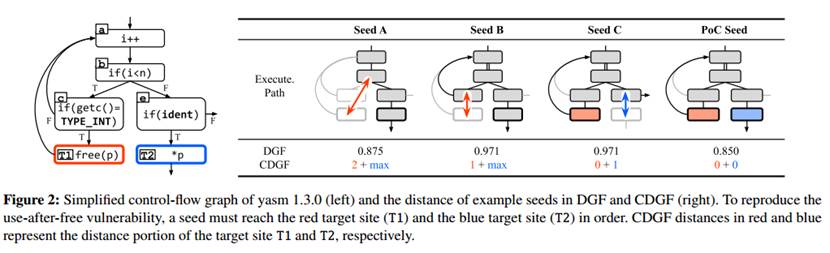
约束指示程序首先到达T1,在那里内存对象被释放,然后到达T2,在那里释放的内存对象被使用。给定图2中的种子和图4中的约束条件,CDGF计算种子的距离如下:
• Seed A.因为它在距离T1两个块的b处最接近T1,所以第一个约束的距离是2。同时,由于未能到达T1,第一个约束%free的目标位点,所以无论是否到达T2,第二个约束%use的距离都是最大的。将两个距离结合起来,种子距离计算为2+max。
• Seed B.因为它接近T1的距离更近,因为它接触到距离T1一个块c,所以T1的距离是1。同时%use距离仍然是最大的,因为它在到达T2之前仍然没有到达T1。结合两者,种子距离计算为1+max。
• Seed C.因为它在T2之前到达T1,所以%free的距离为0。同时,由于它在e处使T2偏转了一个基本块,所以%use的距离为1。两者结合,种子距离为1。
通过对距离较短的种子进行优先排序,CDGF可以在更理想的种子基础上变异种子,并快速触发崩溃。
技术2:
参考论文:Titan: Efficient Multi-target Directed Greybox Fuzzing (computer.org)
现有的模糊测试不知道目标靶点之间的相关性,因此,随着目标靶点数量的增加,可能会退化为无向模糊。最终,模糊器不能有效地选择种子并有效地生成多个目标的输入,称之为协同无知问题。
针对此问题
- 设计了一个精确的静态分析来推断达到多个测试目标的协同作用,使我们能够通过区分目标之间的相关性来减轻协同忽略问题。
- 协同感知调度策略,该策略通过种子的细粒度排序来发现种子可能到达的目标最多。
- 以多目标为导向的突变,生成接近多个目标的输入,所需的执行次数更少。
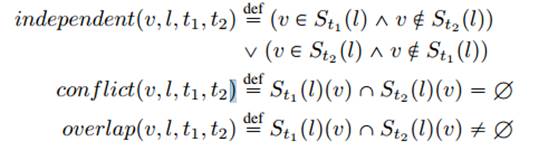
静态分析:给定一组目标程序点,设计了两步静态分析:推断达到每个目标的先决条件、计算区分多个目标的相关性。
先决条件分析:

计算多个目标相关性:
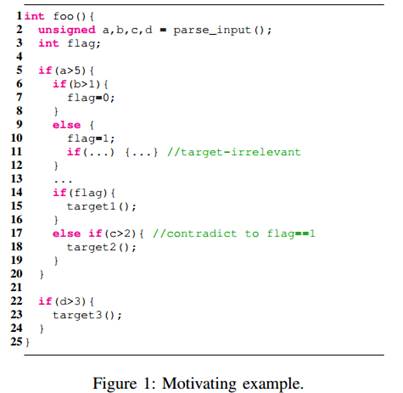
不同目标的推断变量范围可能具有许多相关性。例如,考虑上面示例中的多目标可达性摘要。达到目标1和目标2都要求变量a的范围相同,但它们对变量b的范围有排他性要求。
计算公式
协同感知种子调度:
确定种子可到达的靶点:

种子应该关注条件较满足的目标,而不是同时解决所有目标的条件。因此,不是所有的目标都应该被种子考虑。由于冲突相关性表示两个目标的矛盾,因此在调度过程中,我们认为其中一个目标与当前种子无关。
确定种子到达靶点的潜力:
使用在执行中满足的先决条件的比例来度量一个种子( 记为potential(t))

有了到达每个靶点的潜力,我们将它们累积为一个种子s来衡量达到这些靶点的可能性

以多目标为导向的突变:
为了有效地生成多个目标的输入,我们提出同时对不同目标的多个字节进行变异。具体来说,我们首先推断影响不同目标的字节,以确定哪些可以同时突变。然后我们优先改变那些可以到达更多目标的字节
1)****推断seed中受影响的bytes
独立相关性中的变量可以同时改变以接近不同的目标。因此,如果这些变量的值依赖于不同的字节,模糊器可以同时改变它们以生成多个目标的输入
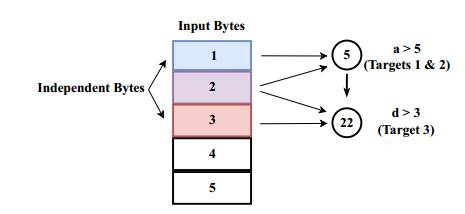
改变独立字节以提高输入生成效率的直觉。如果字节1和字节3同时发生突变,则fuzzers可以同时满足三个目标的两个条件,并且执行的次数更少。
2)****针对多个targets,变异这些bytes
根据它可以影响的靶点数量来确定字节的优先级。这是通过自适应方法实现的,其中我们首先推断每个靶点的字节,然后改变其重点输入字节
以概率p选择字节

多元动态能量感知的种子分级技术
传统的模糊测试软件在对种子进行评分的过程中,基本只采取单一的种子评价标准。譬如AFL基于代码覆盖率进行种子评价,AFLGo基于基本块距离的种子评价。
现有种子分级方案考虑因素单一性带来了漏洞发现能力的局限,使得传统模糊测试工具无法满足特定场景下实现靶向挖掘的需求。
面对现有的技术难点,首先在传统的种子评价方法之上(比如:基本块距离、代码覆盖率、崩溃率等),基于效果驱动提出更多种子评价方法,包括种子的执行时间、位图大小(即该种子的覆盖率)、障碍(即该种子在队列中的落后周期数)、深度(即该种子是由多少次变异产生的,深度越高,表示该种子越复杂)、距离(即该种子距离目标函数的距离,距离越小,表示该种子越接近目标函数)、相似度(度衡量种子和目标之间执行轨迹相似程的指标,相似度越高,说明种子越有可能触发目标函数或者导致目标状态变化),形成全新的多元种子评价标准集合,并将之命名为多元融合模块。
多元融合模块指标计算部分的修改代码在afl-fuzz.c文件的5111-5267行:
1 | //输入参数struct queue_entry* q: 指向待计算分数的测试用例结构体的指针, |

